
Электронная программа устойчивости ESP
Управление. Управление автомобилем базируется в пределах физических возможностей управления и соответственно должно учитывать три степени свободы автомобиля как на плоскости дороги, имеется ввиду поперечная и продольная составляющие движения автомобиля и конечно же поворот относительно оси вертикали. Для начала необходимо определить как именно должно происходить движение автомобиля в соответствии с действиями водителя, а также поведение водителя на дороге.
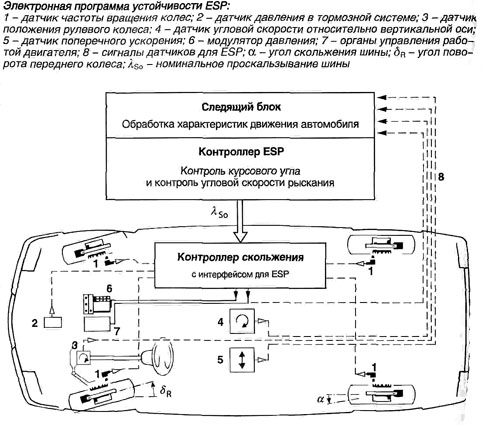
Для уменьшения разности между двумя действиями шины должны управляться специальными механизмами. На схеме вы видите структуру управления, которая в свою очередь состоит из главного контроллера, и дополнительных контролеров скольжения. Блок слежки занимается определением переменной контролируемого состояния. Ведется оценка сигналов от датчика положения 3 рулевого колеса, датчика давления (2) тормозной системы, а также органы управления работой двигателя. Кроме скорости движения транспортного средства в расчете учитываются необходимые данные коэффициентов сцепления между шинами и дорожным покрытием. Следующие параметры оцениваются на основе сигналов, которые исходят от датчиков угловой скорости, поперечного ускорения и давления в тормозной системе. После чего вычисляется момент относительно вертикальной оси.
 {jcomments on}
{jcomments on}