
Тенденции развития автомобильного бортового электронного оборудования
Тенденции развития автомобильного бортового электронного оборудования
Современный автомобиль состоит из четырех основных агрегатов: двигателя внутреннего сгорания (ДВС), кузова, шасси и ходовой части. Эти агрегаты состоят из различных функциональных систем, которые обеспечивают выполнение главной функции автомобиля — перевозку грузов и пассажиров. Для того чтобы перевозки были безопасными, а для пассажиров и комфортными, чтобы агрегаты, узлы, блоки, системы работали безотказно, на автомобиле широко используются электротехнические устройства и средства электрон пой автоматики.
► В последние годы техническая оснащенность автомобилей электронной бортовой автоматикой значительно возрастает.
Совсем недавно микропроцессорные системы зажигания, электронные системы управления гидравлическими тормозами, системы впрыска бензина, бортовая сам oil и а гностика считались последними достижениями в области автомобильного аппарате и приборостроения. Теперь их относят к классическим системам и устанавливают почти на каждый серийный автомобиль.
В наши дни на вновь разрабатываемые модели автомобилей дополнительно начинают устанавливать совершенно нетрадиционные бортовые автоматические системы, к которым относятся: информационная система водителя с микропроцессорным обеспечением; спутниковая навигационно-поисковая система; радарные и ультразвуковые системы зашиты автомобиля от столкновений и угона; системы повышения безопасности и комфорта людей в салоне; система круиз-контроля; система «электронная карта»; мультиплексная электропроводка.
Параллельно проводятся поиски более эффективных компьютерных технологий обработки информации в бортовых электронных системах. Разработаны и уже находят применение так называемые лингвистические функциональные преобразователи, работающие с нечеткими подмножествами лингвистических переменных, выраженных отдельными словами или целыми предложениями на естественном (английском) или искусственном (компьютерном) языке. При некотором усложнении логических и арифметических операций в микро ЭВМ это позволяет повысить точность и скорость (быстроту) обработки сигналов. Как следствие, значительно усложнился интерфейс, и возникла необходимость в ведении CAN- пpoтокола в мультиплексную систему.
На базе электронных систем автоматического управления двигателем (ЭСАУ-Д) и тормозами (ЭСАУ-Т) разработана и уже применяется гироскопическая система VDC для повышения курсовой устойчивости автомобиля на дороге в сложных условиях движения. Система VDC работает по принципу запрограммированного под нештатные условия движения совместного воздействия на крутящий момент ДВС (посредством системы ASR) и на антиблокировочную систему тормозов ABS, чем исключается боковой увод (снос) автомобиля при поворотах на большой скорости или на скользкой дороге. Водителю в таком случае отводится роль активного наблюдателя, контролирующего н корректирующего поведение автомобиля.
Интенсивно ведутся научные исследования возможности применения электромагнитных клапанов с электронным управлением в газораспределительном механизме (ГРМ) поршневого ДВС. Идею заменить классические механические клапаны электромагнитными еще в 50-х гг. XX в. предложил профессор Московского автомобильно-дорожного института (МАДИ), доктор технических наук Владимир Митрофанович Архангельский. Что это дает поршневому ДВС, хорошо известно теоретически [24]. Но практическая реализация идеи оказалась исключительно трудоемкой задачей, над решением которой работают специалисты многих зарубежных фирм и отечественные разработчики. Теоретические и экспериментальные исследования уже завершены. Теперь идут разработки конструкторских вариантов исполнения ГРМ с электромагнитными клапанами.
Наряду с усовершенствованием автомобильных бензиновых ДВС все более активизируются работы по созданию экологически чистых силовых установок для электромобилей. Полагают, что достойной заменой городскому автомобилю может стать гибридный электромобиль, электронные системы управления которым также относятся к современным новациям в области автомобилестроения.
В современных условиях глобальным требованием к новейшим автомобильным электрическим и электронным системам является неукоснительное исполнение международных стандартов OBD-II (США) и EOBD-II (EU), которые также продолжают совершенствоваться.
► Помимо специфики выполняемых функций новейшие системы автомобильной бортовой автоматики кардинально отличаются от классических, чисто электронных систем широким разнообразием принципов действия входящих в них составных подсистем. В зависимости от решаемой задачи в новую систему в качестве основных компонентов могут входить не только электрические и электронные узлы и блоки, по и механические, гидравлические, светооптические, ультразвуковые и любые прочие устройства, имеющие неэлектрическую природу функционирования. Их роль в реализации заданной функции управления главная, хотя все информационные процессы в системе реализуются на уровне электронных блоков управления (ЭБУ), а в новейших системах — в бортовых микропроцессорах. Такие крупные составные комплексы управления не могут относиться ни к механическим, ни к электрическим, ни к электронным, ни к любым другим «чистым» по принципу действия системам. В этой связи новейшие системы автомобильной бортовой автоматики, устанавливаемые на концептуальные автомобили, получили повое название — автотронные системы.
Автотронная система, управляя неэлектрическими процессами через неэлектрическую периферию на выходе, сама управляется от сигналов, имеющих неэлектрическую природу, которые формируются неэлектрической входной периферией.
► Например, автотропная система VDC (управления курсовой устойчивостью движения автомобиля), функциональные взаимосвязи которой с водителем и дорогой показаны на рис. 1.1, использует в качестве входной информации скорость движения, углы наклонения кузова, разность частот вращения колес, угол поворота руля, атмосферные условия, а в некоторых вариантах — давление в шинах и состояние дорожного покрытия.
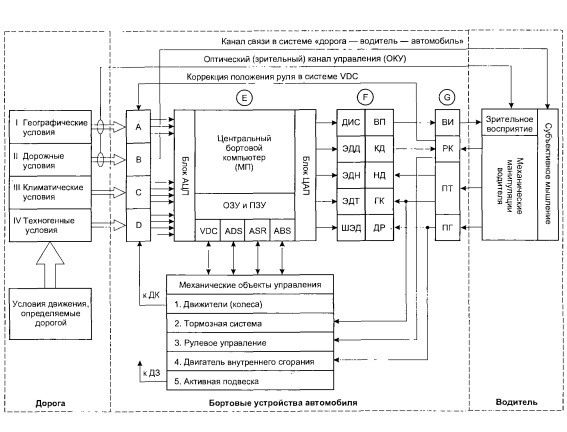
Описание условных обозначений, принятых на рис 1.1.
1. Географические условия: извилистость дороги, спуски, подъемы, повороты, перекрестки дорог, переезды.
2. Дорожные условия: тип дорожного покрытия (гравий, бетон, асфальт); асфальт сухой, мокрый, обледенелый; освещение дороги; плотность транспортного потока.
3. Климатические условия: атмосферные - температура, влажность, давление; температура асфальта.
4. Техногенные условия: сцепление колес с дорогой но состоянию протекторов шин; скорость вращения колес; скорость рыскания; боковой увод автомобиля, боковой увод колес, боковое ускорение.
A. Блок датчиков: угла поворота руля; угла поворота кузова автомобиля вокруг вертикальной оси (гироскоп); бокового ускорения.
B. УВР — управляющие реакции водителя, являющиеся откликом субъективного мышления на дорожные условия движения; проявляются индивидуально в зависимости от физического и психического состояния человека.
C. Блок датчиков: температуры, давления, влажности в атмосфере, температуры асфальта (по давлению в шинах).
D. Блок колесных датчиков (ДК) ABS и вычисляемых в ЭБУ системы VDC неэлектрических входных параметров .
E. Центральный боковой компьютер (микропроцессор МП), в который интегрированы все логические и вычислительные функции четырех автоматических систем управления VDC, ADS, ASR, ABS. Содержит оперативную (ОЗУ) и постоянную (ПЗУ) память, а также входные аналогово-цифровые (АЦП) и выходные цифроаналоговые (ЦАП) преобразователи.
F. Блок оконечных преобразователей электрических сигналов в неэлектрические воздействия:
а) ДИС/ВП — драйверы информационной системы водителя (ДИС) и визуальный преобразователь (ВП) электрического сигнала в оптическое изображение;
б) ЭДД/КД — электродвигатель (ЭДД) и клапан (КД) демпфирования активной подвески (системы ADS);
в) ЭДН/НД — электродвигатель (ЭДН) и нагнетатель (НД) высокого давления в системе VDC;
г) ЭДТ/ГК — электродвигатель (ЭДТ) и гидроклапаны (ГК) системы ABS;
д) ШЭД/ДР — шаговый электродвигатель (ШЭД) и дроссельная заслонка (ДР) системы ASR.
G. Блок водительских органов управления: ВИ — визуальные индикаторы (стрелочные, электронные, дисплей и пр.); РК — рулевое колесо; ПТ — педаль тормоза; ПГ —- педаль акселератора (газа).
Все это неэлектрические проявления условий движения автомобиля, которые с помощью входных неэлектрических преобразователей перерабатываются в неэлектрические информационные сигналы: скорость движения — в круговую частоту вращения колес; углы вертикального наклонения — в механические перемещения инерционных элементов в гироскопическом устройстве; угол поворота руля — в движение (поворот) светомодулирующего (колирующего) диска; давление в шинах — в прогиб упругой мембраны и т. д.
Полученные таким образом неэлектрические информационные сигналы посредством входных датчиков (рис. 1.1, поз. А, С, D) преобразуются в электрические сигналы: поворот кодирующего диска на руле — в цифровой электрический код; круговая частота вращения колес — в последовательность электрических импульсов с изменяющейся частотой следования; перемещение инерционных элементов гироскопа, упругой мембраны датчика давления — в аналоговые электрические сигналы, которые далее с помощью аналогово-цифровых преобразователей (АЦП) перерабатываются в цифровые электрические сигналы, пригодные для подачи на вход микропроцессора МП.
Микропроцессор — это центральный орган управления (мозг) автотронной системы. Его главная функция заключается в преобразовании электрических информационных сигналов об условиях движения автомобиля, полученных от входной периферии, в электрические сигналы управления, несущие информацию об интенсивности и последовательности неэлектрических воздействий на неэлектрические органы управления. Такая информация формируется в микропроцессоре в виде кодовых последовательностей электрических импульсов, которые для непосредственного управления неэлектрическими органами непригодны.
Для согласования энергетических уровней без нарушения информационного содержания на выходе микропроцессора реализуется обратное преобразование информационных сигналов из цифровой в аналоговую форму. Эту функцию выполняют цифроаналоговые преобразователи (ЦАПы), которые одновременно являются усилителями мощности аналоговых электрических сигналов.
Чтобы выполнить управляемое неэлектрическое воздействие на неэлектрические органы управления, вслед за ЦАПами устанавливаются оконечные преобразователи электрических сигналов в механические или любые другие неэлектрические воздействия. Оконечные преобразователи (блок F на рис. 1.1) являются выходными исполнительными устройствами автотронной системы, но не являются ее информационным окончанием. В отличие от электронной системы автотронная система включает в свой состав и неэлектрические объекты управления, которые и являются оконечными потребителями информации. Применительно к рассматриваемой системе управления устойчивостью движения автомобиля, оконечными потребителями информации являются: система подачи топлива в двигатель 4, тормозная система 2 автомобиля и информационная система водителя с визуальными индикаторами (ВИ) и оптическим (зрительным) каналом управления (ОКУ). Эти три системы представляют собой выходную исполнительную периферию автотронной системы, которая (периферия) под автоматическим управлением микропроцессора, при крайне ограниченном (посредством коррекции положения руля) участии водителя, обеспечивает наиболее оптимальный режим движения автомобиля в сложных дорожных условиях или в аварийной ситуации (более подробно система VDC описана в главе 8).
► Другой пример — автотронное управление насос-форсунками, которые используются в системах впрыска бензина под большим давлением непосредственно в камеру сгорания для реализации внутреннего смесеобразования. Начиная с 2000 года такие форсунки стали устанавливаться в двигателях экспериментальных легковых автомобилей фирмы TOYOTA (Япония).
Насос-форсунка (рис. 1.2), являясь гидромеханическим устройством, приводится в действие от кулачка 10 распределительного вала ДВС, а управляется от электронной системы S автотронного управления впрыском (ЭСАУ-В) посредством быстродействующего электрогидравлического клапана 2.
Насос-форсунка является ярким примером составного компонента автотронной системы. Входными неэлектрическими сигналами здесь служат: частота вращения и угловое положение распределительного вала; абсолютное давление (разрежение) во впускном коллекторе; температура двигателя и положение водительской педали газа. Эти неэлектрические величины с помощью соответствующих датчиков и АЦП преобразуются в числоимульсную последовательность электрических сигналов и подаются на вход микропроцессора ЭСАУ-В. В микропроцессоре путем математической обработки входных сигналов происходит формирование последовательности управляющих импульсов для электрогидравлического клапана насос-форсунки.
В данном случае ЦАП на выходе микропроцессора не применяется, но управляющие импульсы усиливаются в усилителе мощности и подаются на обмотку электромагнита гидроклапана 2. Гидроклапан представляет собой выходное исполнительное устройство автотронной системы. Однако объектом управления является не гидрокланан, а точно отмеренная по массе и распределенная по времени струя 21 распыленного бензина, поступающая в объем цилиндра через дисковый запорный клапан 17 форсунки. Управление струей позволяет получить так называемый послойный впрыск бензина, суть которого состоит в строго дозированной подаче топлива отдельными порциями и в строго определенное время. При этом за один цикл впрыска бензин подается не сплошной однородной струей, как в обычной форсунке с электронным управлением, а несколькими частями, каждая из которых образует «свой» коэффициент избытка воздуха р. В объеме цилиндра образуется послойная структура ТВ-смеси с разной концентрацией компонентов. Преимущество прямого послойного впрыска бензина состоит в том, что в первый момент воспламенения в зоне центрального электрода 19 свечи зажигания 18 имеет место стехиометрическая (нормальная) ТВ-смесь с коэффициентом (3=1), которая легко возгорается. Далее процесс горения бензина при значительном избытке кислорода (р = 2,0) поддерживается за счет «открытого огня», образовавшегося в первый момент воспламенения. Такой процесс сгорания ТВ-смеси позволяет получить значительную экономию бензина (до 35%), понизить выброс в атмосферу угарного газа СО и углеводородов СН, а также увеличить удельную мощность двигателя.
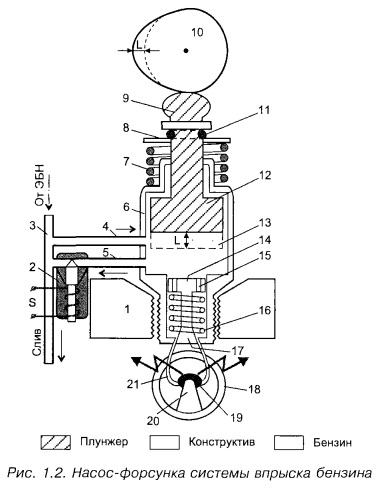
1 — фрагмент блока цилиндров в зоне камеры сгорания; 2 — магнитоэлектрический гидроклапан в сливном канале; 3 — главная бензомагистраль; 4 — подающая бензомагистраль; 5 — сливной канал (обратная бензомагистраль); 6 — корпус насос-форсунки; 7 — возвратная пружина плунжера; 8 — опорная тарелочка пружины плунжера; 9 — толкатель плунжера; 10 — кулачок распредвала; 11— запорное кольцо опорной тарелочки; 12 — поршень плунжерного насоса; 13 — рабочая полость насос-форсунки; 14 — гидромеханическая форсунка закрытого типа высокого давления (100—150 бар);
15 — перепускной канал из полости плунжерного насоса в полость форсунки; 16 — возвратная пружина запорного клапана форсунки; 17 — дисковый запорный клапан форсунки; 18 — свеча зажигания (СЗ); 19 — центральный электрод СЗ; 20 — боковой электрод; 21 — конус (струя) распыленного бензина; L — ход плунжера.
► Из приведенных примеров очевидно, что автотронная система является совокупностью самых различных по принципу действия устройств, объединенных в единый комплекс с целью выполнения требуемой специфической функции управления, регулирования или текущего контроля на борту автомобиля. Современные подходы автомобилестроителей к комплексному решению задач автоматического контроля, управления и регулирования приводят к тому, что подавляющее большинство новейших автомобильных систем бортовой автоматики являются автотронными, входными воздействиями для которых являются неэлектрические проявления режима работы, условий движения, дорожных ситуаций и других факторов, а выходными потребителями информации (объектами управления) — неэлектрические узлы, блоки, устройства, газообразные и жидкостные среды, имеющие место на автомобиле, и сам водитель. Это принципиальные отличия автотронных систем от чисто электронных и электрических.
► Говоря о тенденциях и перспективах развития автомобильных бортовых устройств, следует отметить, что традиционно наиболее интенсивно совершенствуются узлы, агрегаты и схемы классического электрооборудования. Уже скоро в бортсеть автомобиля будет внедрено второе рабочее напряжение 42 вольта. Это связано с необходимостью повышения напряжения электропитания для новейших энергоемких потребителей, таких как силовые электромагнитные гидроклапаны, электромагнитные соленоиды силовых исполнительных устройств, мощные электродвигатели, силовые электронные коммутаторы, мультиплексная электропроводка и т. п. Ясно, что при повышении напряжения электропитания соответственно уменьшаются токи в цепях потребителей, что приводит к более надежной и экономичной их работе. Но сразу переводить все электропотребители на новое напряжение, как это было сделано при переходе с 6 на 12 вольт, в настоящее время нерационально. Причина тому — выпуск 12-вольтовых потребителей огромными сериями, технологическая оснащенность производства и, главное, все эксплуатируемые в настоящее время автомобили оборудованы 12-вольтовьши потребителями (электролампы, электродвигатели, электронное и микрокомпьютерное оснащение, аудио-, радио-, видеоаппаратура, бортовая самодиагностика и т. п.).
Единой стратегии перевода бортсети автомобиля на более высокое напряжение пока нет. Полагают, что некоторое время на автомобиле будет два напряжения: 12 вольт — для классического электрооборудования, и 42 вольта — для новейших мощных потребителей. Такой подход широко используется па многотонных грузовых автомобилях, где мощные электропотребители 24-вольтовые, а освещение — от 12 вольт. Еще более яркий пример — электромобили. Здесь главная тяговая аккумуляторная батарея, управляющий контроллер и тяговый электродвигатель рассчитаны па напряжение 120...380 В и соединены между собой отдельными цепями. При этом бортсеть остается 12-вольтовой.
Из приведенных примеров ясно, что функциональное многообразие бортовых электрических устройств неизбежно приводит к необходимости применения на автомобиле нескольких первичных источников электроэнергии с различными рабочими напряжениями. При этом не исключено, что будет использоваться и переменное синусоидальное напряжение для специальных потребителей.
► Под новые напряжения в первую очередь будут модернизированы бортовые электромашины. Уже в наши дни значительно видоизменен электростартер. В нем не применяется последовательное возбуждение, которое заменено возбуждением от постоянных магнитов. Жесткая механическая характеристика электродвигателя +12В стартера согласовывается с пусковым моментом ДВС посредством планетарного редуктора (редуктора Джемса). Давно нет коллекторных генераторов постоянного тока, их заменили многофазные синусоидальные генераторы с полупроводниковыми выпрямителями и электронными регуляторами напряжения. Но и такие генераторы могут значительно видоизмениться при появлении второго рабочего напряжения или если необходимость в высоковольтном переменном напряжении станет реальной.
Ведутся также разработки по созданию универсальной электрической машины, так называемого «стартер-генератора», которая сможет выполнять две функции: запуск ДВС и подачу электроэнергии в бортсеть после запуска ДВС.
► Современная микропроцессорная система зажигания с низкоуровневым многоканальным распределением энергии по свечам [2] является наиболее совершенным решением проблемы принудительного электроискрового воспламенения ТВ-смеси в цилиндрах поршневого ДВС. Но и это не предел достижений. Уже испытаны лазерные свечи зажигания, которые работают непосредственно от электронной схемы управления без промежуточного энергонакопителя. Это позволит значительно повысить надежность и КПД системы зажигания, а также избавить ее от высокочастотных электроискровых помех на другие узлы и блоки бортовой электронной автоматики. Электронной схемой управления может стать магнитный модулятор сжатия, работающий на ферромагнитных сердечниках насыщения. Схема такого модулятора показана на рис. 1.3, основным элементом в которой является высоковольтный трансформатор с насыщающимися сердечниками.
Если магнитопровод трансформатора ввести в режим насыщения, то его коэффициент трансформации резко падает и энергия из первичной обмотки во вторичную не трансформируется.
Выходной трансформатор имеет два изолированных друг от друга магнитопровода — М, и М2, охваченных общей первичной обмоткой W,. Каждый магнитопровод оснащен отдельной обмоткой управления (WB' и WB") и отдельной двухвыводной вторичной обмоткой (W2' и W2")
Когда по управляющей обмотке W,,' протекает ток, достаточный для насыщения сердечника М,, а обмотка WB" обесточена, то высокое напряжение будет наводиться только во вторичной обмотке W2". Если обесточить управляющую обмотку WEJ' и пропустить ток насыщения по обмотке WB", то насытится сердечник М и высокое напряжение будет трансформировано только в обмотку W2.
Система зажигания с трансформатором насыщения обладает высокой надежностью, малыми габаритами и весом.
В заключение следует отметить, что не все известные разработки бортовых систем вышли из стадии экспериментальных исследований. Они используются в основном на фирменных моделях спортивных и концептуальных автомобилей. Но, как и прежде, почти все новации, испытанные на концепткарах, рано или поздно начинают применяться на серийных автомобилях.
Таковы тенденции развития автомобильной техники и, в частности, систем бортового электрического, электронного и автотронного оборудования.
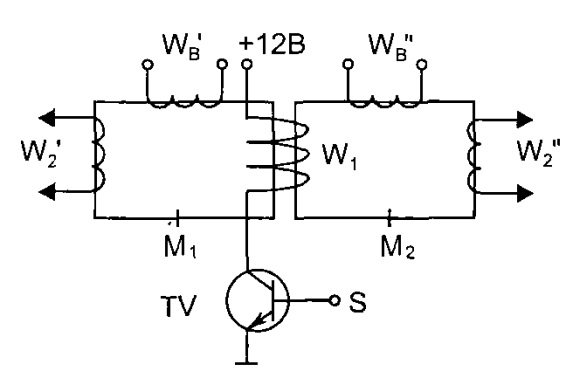
Рис. 1.3. Магнитный модулятор системы зажигания
{jcomments on}